

 联系我们
联系我们

原因:指令值和反馈值基本相同,误差寄存器中的数值由指令值和反馈值相减产生,接近于零。但是如果指令值和反馈值的方向相反或者只有指令/反馈一端不断产生变化,就会造成误差寄存器中的数值越来越大,直到超出范围,发生报警。——————此问题常见于齿轮机和CF轴立车上。
1:如果机床正常运行,存在指令和反馈,反馈距离正常
确认为指令和反馈方向相反造成,此时请切换3706#6#7,切换M03、M04和G70.5、G70.4,或者尝试改变编程方式
2:如果机床存在只有指令输出,无实际反馈
请确认机床运行状态、功能或者外围硬件
3:如果机床存在反馈,无指令,例如立车CF轴控制方式
请使用控制轴拆除功能
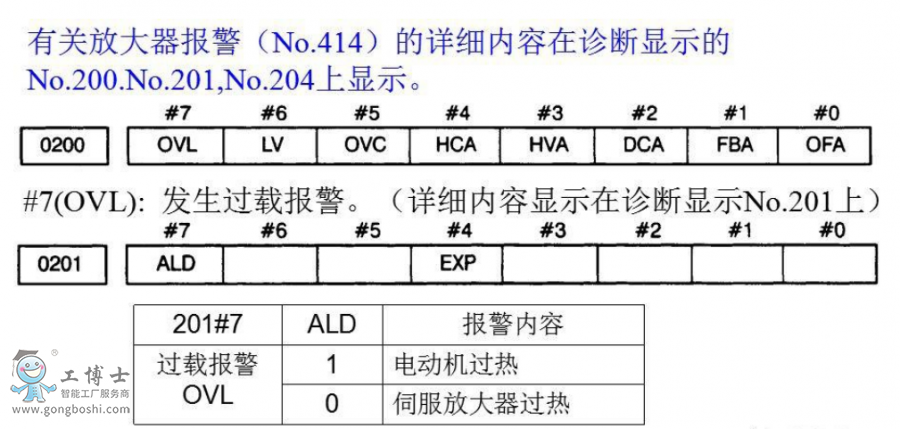
SV414伺服报警:
414报警:看诊断200,201,204。没有指令电压。上电时序错误。414报警,伺服参数初始化错误,电机代码错误。指令线接线错误。414低电压报警,DC24V电源容量小。1 电源不好或者容量小。
SV0415 移动量过大:
原因:移动速度超过限制的速度
1:降低指令速度
2:FSC+PMC+CS控制方式下的的齿轮加工可以尝试以下方案:
1)修改参数P2068=0
2)修改参数P8003#3=1
3)根据实际情况设定参数P8005#4、P8007#2
以上内容来源于:网络
侵权删
工博士可以提供发那科FANUC机器人及常用型号,并且包括机器人项目集成案例、售后服务、机器人维护、保养等服务,并且我们集九大机器人代理于一体,真正做到了为客户进行一站式的服务保障。如果您想了解更多机器人产品咨询,欢迎联系我们!
更多机器人咨询请咨询:发那科机器人代理一站式服务平台
- 下一篇:发那科ROBOTS 如何进行零点标定
- 上一篇:发那科出席中国机器人系统集成商峰会
